
Cytron社製のMaker Pi RP2040で、CircuitPythonの基本をアップしています。これらを組み合わせて楽しい電子工作を始めてください。Maker Piはあらかじめモーターシールド、サーボモーターシールド、neopixelが搭載された素晴らしいマイコンボードです。あとはRaspberry pi PicoやPico Wも触れていきます。
 made it!
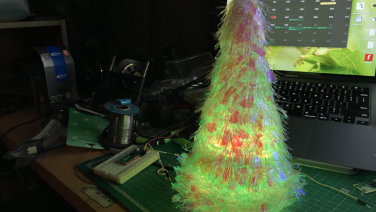
made it! クリスマスツリーを光らせる
ダイソーで買った100円ツリーをWS2812bをPaspberry Pi picoでクールに制御します。adafruit_led_animationのライブラリを参照すればいろいろなイルミネーションを楽しむことができますよ。
 made it!
made it! Knight Rider風のLEDを車に搭載する
アメリカのテレビドラマ「ナイトライダー」をおぼえていますか?AI搭載のナイト2000の流れるLEDが印象的でしたね。WS2812bをRaspberry Pi picoで制御します。
 CircuitPython
CircuitPython プログラミング入門05リスト
Pythonにはリストという便利な機能があります。このリストの機能をみていきましょう。appendでリストの要素を追加してfor文でLEDを順番に点灯していきます。
CircuitPython プログラミング入門04PWM
PWM制御を使ってLEDの光の量をコントロールします。CircuitPythonのpwmioモジュールの使い方の解説です。Pulse Width Modurationでモーターの制御なんかにも使えるかなり重要なモジュールです。しっかりおぼえておきましょう。またfor文についても更に深く解説しています。
CircuitPython プログラミング入門03関数
よく使う処理を関数化して定義します。関数化しておくことで簡単に呼び出すことが出来ます。for文についても解説しています。単純な繰り返しのときに便利な関数です。
CircuitPython プログラミング入門02変数
今回はPythonの変数についてみていきます。変数とは変えることが出来る数字。変数を使ってテンポをコントロールします。変数は四則演算が可能です。
CircuitPython プログラミング入門01
Raspberry Pi picoでCircuitPythonを一から学習していきます。importとはなにか。digitalioの使い方、そしてtime関数の使い方を学んでいきましょう。
 CircuitPython
CircuitPython テキストスクロール看板をAdafruit IO経由で操作する#15
Raspberry pi pico Wを使ってサインボードを作成。CircuitPythonで開発しています。制作費は5,000円ほどでしょうか?
CircuitPython pico wとCircuitPythonでテキストをスクロールさせる看板を作る#14
Raspberry pi pico Wを使ってテキストをスクロールする看板を作ります。Matrix PanelはWS2812b仕様の中華製パネルを使用します。
CircuitPython tiltセンサーをクラウド監視#13
AH407のデータをAdafruit.IO経由でクラウド監視します。遠隔地の情報もインターネット経由で確認できます。またスマホからの確認も簡単ですね。